
Gambaran keseluruhan
Kren jambatan, biasanya dikenali sebagai "memandu", adalah sejenis jentera pengangkat yang digunakan secara meluas dalam perusahaan perindustrian dan perlombongan, mekanisme operasinya terdiri daripada tiga sistem pemanduan yang pada asasnya bebas, sistem pemanduan kereta, sistem pemanduan cangkuk, penyongsang K-DRIVE ke di atas tiga sistem pemanduan berjaya diperbaharui, berikut terutamanya menerangkan proses transformasi pemanduan sebelum dan selepas sistem berjalan.

Skim Kelebihan
- Kawalan vektor gelung terbuka semasa berorientasikan medan, pembolehubah motor yang dipisahkan sepenuhnya, torqu-e frekuensi rendah yang besar, tindak balas pantas, dsb;
- KD600 mengguna pakai mod kawalan vektor gelung terbuka percuma PG dan mod V/F tervektor, dan menguatkan konfigurasi aras kuasa gear pertama;
- Julat kekerapan: tetapan segmen 0.5-600Hz, pelarasan berterusan stepl-ess;
- Julat voltan kerja: 380V ± 20%, dan voltan bas turun kepada 360VDC serta-merta untuk operasi bebas masalah;
- Kapasiti beban lampau: 150% daripada arus undian, 1 minit dibenarkan; 200% undian semasa, 1s dibenarkan;
- Ciri-ciri tork: tork permulaan, lebih daripada 2 kali tork terkadar; Tork frekuensi rendah, lebih daripada 1.6 kali tork terkadar pada 1Hz; Tork brek adalah lebih besar daripada tork terkadar.
Ciri-ciri operasi
- Mekanisme mengangkat kren mempunyai daya kilas permulaan yang besar, yang biasanya melebihi 150% daripada tork terkadar. Jika beban lampau dan faktor lain dipertimbangkan, sekurang-kurangnya 200% tork terkadar hendaklah disediakan semasa proses permulaan dan pecutan;
- Apabila mekanisme angkat berjalan ke bawah, motor akan berada dalam keadaan penjanaan kuasa regeneratif dan mestilah brek penggunaan tenaga atau maklum balas penjanaan semula ke grid;
- Beban mekanisme pengangkatan berubah secara dramatik apabila objek yang diangkat meninggalkan atau menyentuh tanah, dan penukar frekuensi hendaklah dapat mengawal beban impak dengan lancar;
- Memandangkan kelajuan perjalanan pada mekanisme perjalanan hadapan dan belakang kren tidak tinggi semasa reka bentuk mekanikal, penukar boleh digunakan untuk kelajuan lampau yang betul untuk meningkatkan kecekapan kerja.
Gambarajah pendawaian mudah
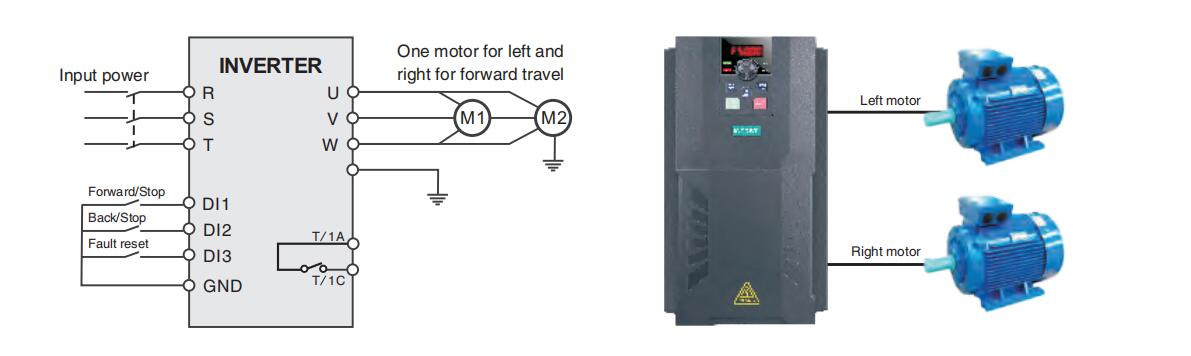
Setti parameterng dan penerangan(parameter perjalanan motor kiri dan kanan)
| Parameter | Terangkan | Tetapan parameter | Terangkan |
| P0-00=0 | Kawalan VF | P5-00=1 | ke hadapan |
| P0-04=1 | Perhentian permulaan terminal luaran | P5-01=2 | laksanakan nanti |
| P0-06=1 | Tetapan frekuensi digital | P6-00=2 | Relay 1 keluaran kerosakan |
| P0-14=60.00 | Kekerapan maksimum | P4-01=1.6KW | Kuasa motor yang disambungkan |
| P0-16=60.00 | Kekerapan had atas | P4-02=380V | Voltan terkadar motor |
| P0-11=60.00 | Kekerapan tetapan digital | P4-04=3.3A | Arus berkadar motor |
| P0-23=3.0s | Masa pecutan | P4-05=50Hz | Kekerapan motor yang dinilai |
| P0-24=2.0s | Masa nyahpecutan | P4-06=960R/Min | Nilai kelajuan motor |
| Nota: Apabila satu penukar frekuensi digunakan dengan dua motor, amat disyorkan untuk memasang geganti terma yang sepadan di hujung hadapan setiap motor untuk melindungi setiap motor. | |||
Analisis kesan operasi
Penukar frekuensi siri KD600 telah menjalankan transformasi penukaran frekuensi pada sistem perjalanan, dan kesan tr-ansformasi adalah agak ideal, terutamanya ditunjukkan dalam:
- Permulaan lembut dan hentian lembut semasa permulaan direalisasikan, yang mengurangkan kesan pada grid kuasa;
- Selepas menggunakan penukar frekuensi, penyentuh anjakan asal dan perintang pengawal selia kelajuan ditinggalkan, yang bukan sahaja menjimatkan kos penyelenggaraan, tetapi juga mengurangkan masa henti untuk penyelenggaraan, sekali gus meningkatkan output;
- Apabila cangkuk utama berfungsi pada 5Hz~30Hz, kesan penjimatan tenaga adalah sangat jelas;
- Penukar frekuensi digunakan untuk mengawal perjalanan depan dan belakang, dan siri mekanisme perjalanan kiri dan kanan boleh merealisasikan kerja lebih frekuensi. Di bawah premis memastikan keselamatan, kecekapan kerja bertambah baik, dan beban kerja penyelenggaraan peralatan perjalanan disebabkan penggantian kerap penyentuh AC juga dikurangkan.
Ucapan penutup
Penukar frekuensi digunakan untuk mengawal berjalan depan dan belakang dan siri mekanisme berjalan kiri dan kanan, yang boleh merealisasikan kerja overclocking, sangat meningkatkan kecekapan kerja di bawah premis memastikan keselamatan, dan juga mengurangkan beban kerja penyelenggaraan peralatan pemanduan kerana penggantian kerap penyentuh AC.
Tapak permohonan

Masa siaran: Nov-17-2023